Agent Communication
Biologically, communication is closely related to and probably originated from cooperation. For example, vervet monkeys can make different vocalizations to warn other members of the group about different predators. Similarly, communication can be crucially important in MARL for cooperation, especially for the scenarios where a large number of agents work in a collaborative way, such as autonomous vehicles planning, smart grid control, and multi-robot control. Communication enables agents to behave collaboratively.
ATOC
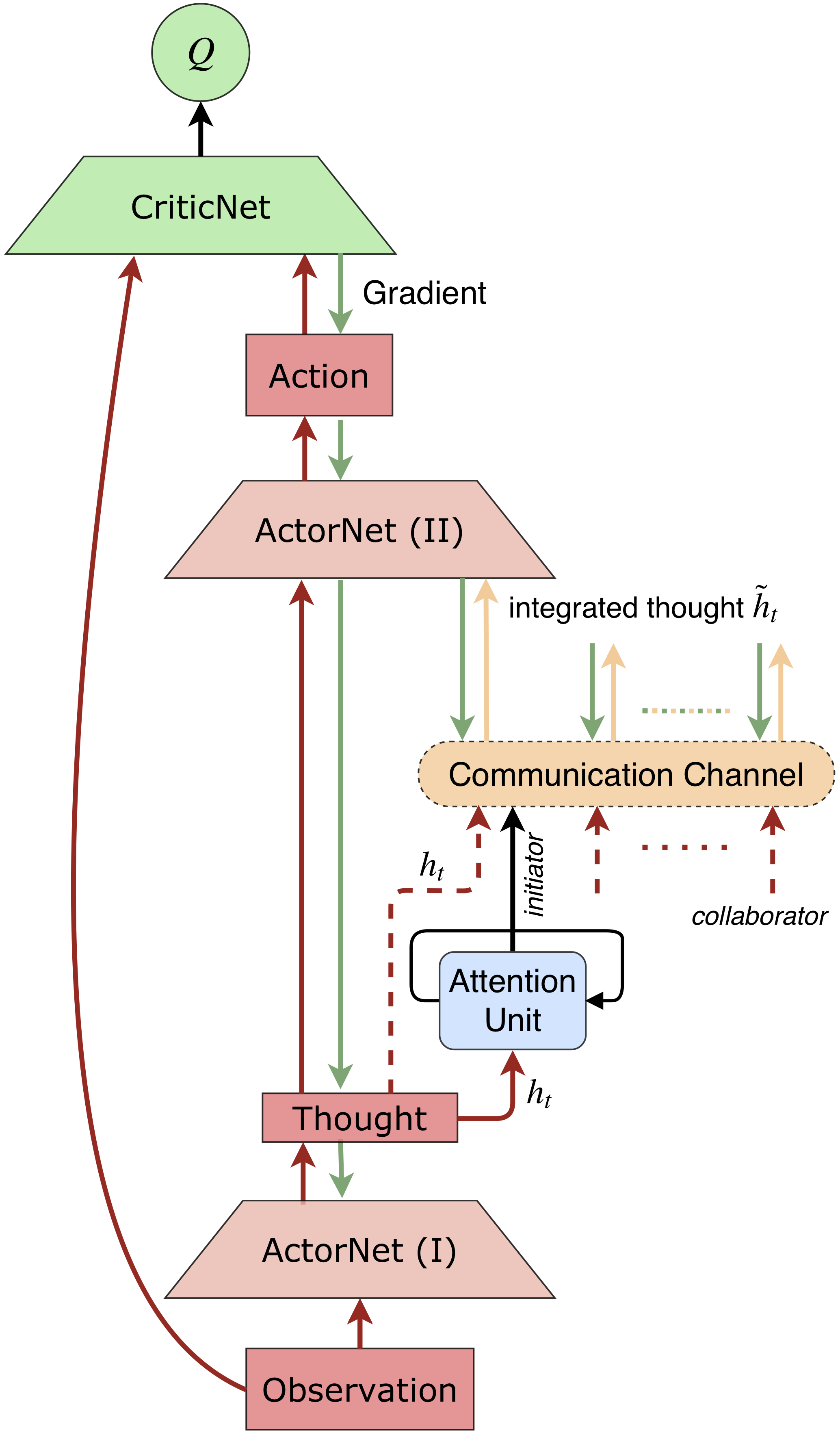 There are several approaches for learning communication in MARL. However, information sharing among all agents or in predefined communication architectures that existing methods adopt can be problematic. When there is a large number of agents, agents hardly differentiate valuable information that helps cooperative decision making from globally shared information, and hence communication barely helps and could even jeopardize the learning of cooperation. Moreover, in real-world applications, it is costly that all agents communicate with each other, since receiving a large amount of information requires high bandwidth and incurs long delay and high computational complexity. Predefined communication architectures might help, however they restrict communication among specific agents and thus restrain potential cooperation. To tackle these difficulties, we propose an attentional communication model, ATOC, to enable agents to learn effective and efficient communication under partially observable distributed environment for large-scale MARL. Inspired by recurrent models of visual attention, we design an attention unit that receives encoded local observation and action intention of an agent and determines whether the agent should communicate with other agents to cooperate in its observable field. If so, the agent, called initiator, selects collaborators to form a communication group for coordinated strategies. The communication group dynamically changes and retains only when necessary. We exploit a bi-directional LSTM unit as the communication channel to connect each agent within a communication group. The LSTM unit takes as input internal states and returns thoughts that guide agents for coordinated strategies. The LSTM unit selectively outputs important information for cooperative decision making, which makes it possible for agents to learn coordinated strategies in dynamic communication environments. ATOC agents are able to develop coordinated and sophisticated strategies in various cooperation scenarios.
There are several approaches for learning communication in MARL. However, information sharing among all agents or in predefined communication architectures that existing methods adopt can be problematic. When there is a large number of agents, agents hardly differentiate valuable information that helps cooperative decision making from globally shared information, and hence communication barely helps and could even jeopardize the learning of cooperation. Moreover, in real-world applications, it is costly that all agents communicate with each other, since receiving a large amount of information requires high bandwidth and incurs long delay and high computational complexity. Predefined communication architectures might help, however they restrict communication among specific agents and thus restrain potential cooperation. To tackle these difficulties, we propose an attentional communication model, ATOC, to enable agents to learn effective and efficient communication under partially observable distributed environment for large-scale MARL. Inspired by recurrent models of visual attention, we design an attention unit that receives encoded local observation and action intention of an agent and determines whether the agent should communicate with other agents to cooperate in its observable field. If so, the agent, called initiator, selects collaborators to form a communication group for coordinated strategies. The communication group dynamically changes and retains only when necessary. We exploit a bi-directional LSTM unit as the communication channel to connect each agent within a communication group. The LSTM unit takes as input internal states and returns thoughts that guide agents for coordinated strategies. The LSTM unit selectively outputs important information for cooperative decision making, which makes it possible for agents to learn coordinated strategies in dynamic communication environments. ATOC agents are able to develop coordinated and sophisticated strategies in various cooperation scenarios.
I2C
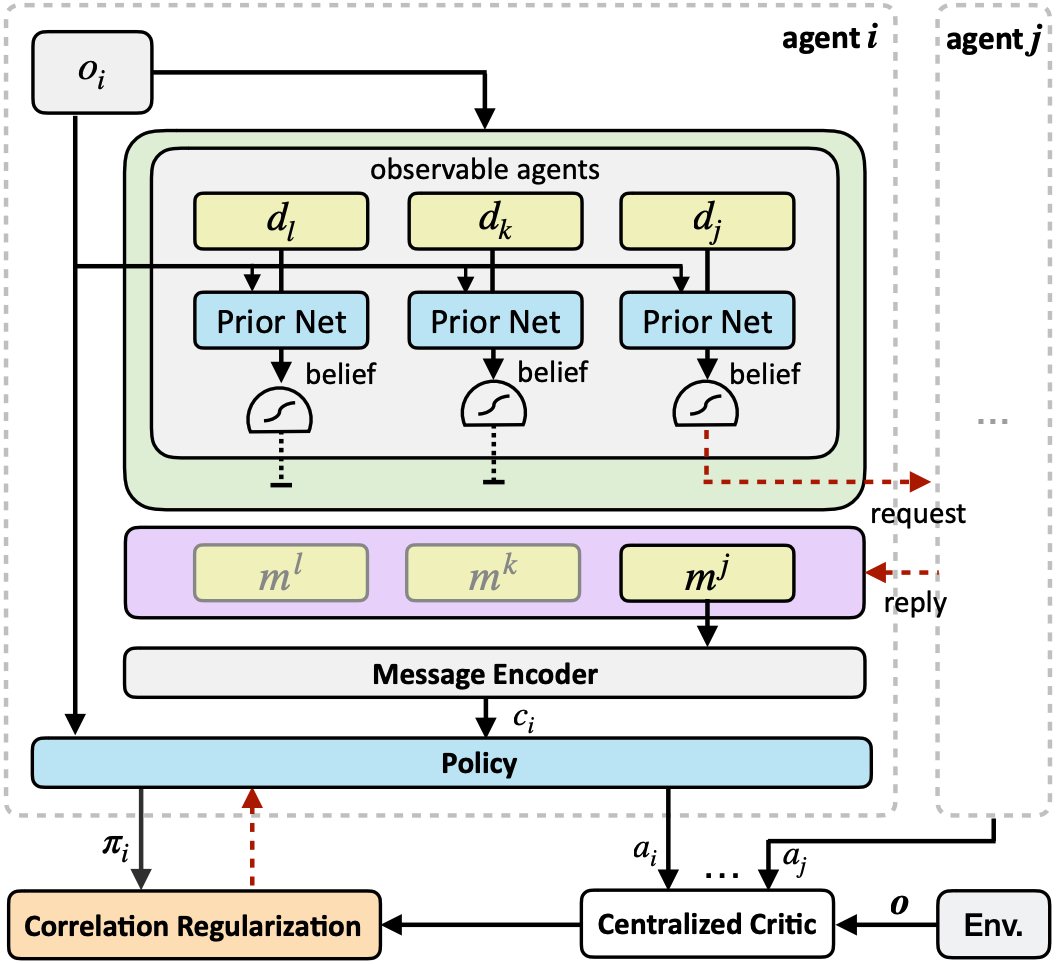 Most existing work of multi-agent communication focuses on broadcast communication, which is not only impractical but also leads to information redundancy that could even impair the learning process. To tackle these difficulties, we propose Individually Inferred Communication (I2C), a simple yet effective model to enable agents to learn a prior for agent-agent communication. The prior knowledge is learned via causal inference and realized by a feed-forward neural network that maps the agent’s local observation to a belief about who to communicate with. The influence of one agent on another is inferred via the joint action-value function in multi-agent reinforcement learning and quantified to label the necessity of agent-agent communication. Furthermore, the agent policy is regularized to better exploit communicated messages. Empirically, we show that I2C can not only reduce communication overhead but also improve the performance in a variety of multi-agent cooperative scenarios, comparing to existing methods.
Most existing work of multi-agent communication focuses on broadcast communication, which is not only impractical but also leads to information redundancy that could even impair the learning process. To tackle these difficulties, we propose Individually Inferred Communication (I2C), a simple yet effective model to enable agents to learn a prior for agent-agent communication. The prior knowledge is learned via causal inference and realized by a feed-forward neural network that maps the agent’s local observation to a belief about who to communicate with. The influence of one agent on another is inferred via the joint action-value function in multi-agent reinforcement learning and quantified to label the necessity of agent-agent communication. Furthermore, the agent policy is regularized to better exploit communicated messages. Empirically, we show that I2C can not only reduce communication overhead but also improve the performance in a variety of multi-agent cooperative scenarios, comparing to existing methods.